
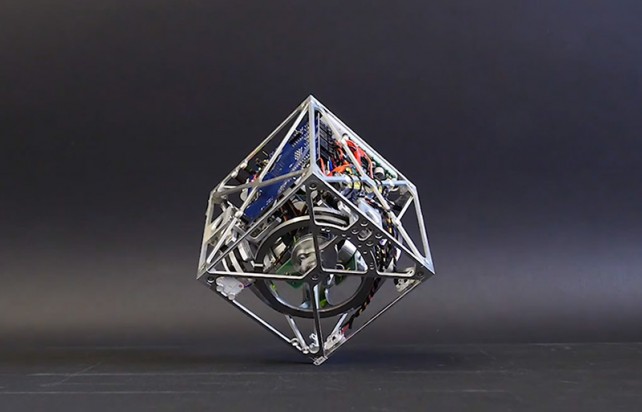
Swiss researchers at Zurich’s ETH Institute for Dynamic Systems and Control, have built a cube-shaped robot that can walk around and balance itself on its edges or corners. The Cubli is able to accomplish these feats because it has three internal spinning wheels, which provide a gyroscopic balancing force. The Cubli device can be commanded to fall in any given direction. Combining these three abilities — jumping up, balancing, and controlled falling — the Cubli is able to, in effect, ‘walk’.”

The Cubli is aware if its position and orientation, because of Inertial sensors connected to an embedded processor and controller, these allow it to stand up on one edge, then move up from there to a single corner and even spin around on an axis.
The principles used are similar to those used in satellites to stabilise them in orbit, so they don’t end up spinning around uselessly. The practical uses for the Cubli’s unusual method of locomotion include walking around on planets during space exploration and it may also be used as a way to develop self-assembling robots.
Watch the video to see Cubli being put to work.
In other news, a separate group of researchers at MIT demonstrated another use for blocks like this back in October. Their robot’s primary function was to reassemble itself. MIT’s cubes had magnets embedded across their sides and edges, which let them grip each other and combine to form different shapes. Though they weren’t able to balance like the Cubli can, MIT’s “M-blocks” could move much further, actually hopping off the ground when getting around. The Swiss researchers say: “But for us it’s just a cool little cube that can jump up, balance, and walk.”
[Image via boingboing]
SOURCE: http://www.t3.com/news/robotic-cube-that-can-balance-jump-and-even-walk